(Deutsche Version unten) How do you plan research that is to be conducted at the seafloor in 4000 meter water depth? How do you choose the locations for your studies in a large area that you may not know much about yet? How do you pick the best spot to deploy sensors? – Which path is the best for the next towed video transect? Where should we dive with the remotely operated underwater vehicle (ROV)?
The answers are complex – of course – but the foundation for planning any seafloor study is a good bathymetric map. Bathymetry is just another word for the seafloor topography. A bathymetric map shows us the exact depth at each location at the seafloor and is important for us to understand the investigated area. Without these exact topographic maps our planning would happen on a blank piece of paper. It would be much more risky to deploy our equipment blindly and the data interpretations would be less meaningful.
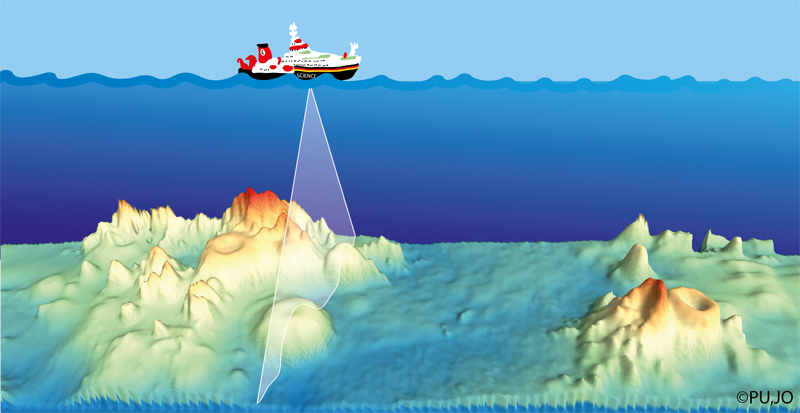
The preferred tool for creating such bathymetric maps is the so-called multibeam echosounder system – in short: multibeam. The basic principle of such a system is that of a sonar: It sends a short acoustic wave signal – also called ping – directed to the seafloor. The multibeam then waits until the ping is reflected back by the seafloor and returns to the ship. From the time it took until the ping returns and from the known speed of sound under water the multibeam can compute the exact depth below the ship. But multibeam systems are special sonar devices specifically developed for mapping the seafloor. It can compute several hundred depth values with exact locations at the seafloor from each individual ping. You can see in the figure how such a measurement in principal looks like. This allows us to create large and detailed topographic maps with a minimum of individual survey lines.
How large the covered area and how detailed the resulting map will be, depends on the multibeam system and how far away we are from the seafloor. Imagine taking a landscape picture using a camera with a fixed focal length. The photo you take will cover more from that huge mountain in front of you the further you are away. However, you will also see less detail and may not be able anymore to distinguish the individual trees that cover it. With the multibeam system on RV SONNE (Kongsberg EM 122; 1° beam opening angle) we can cover 14 to 17 kilometers of the 4 kilometer deep seafloor with each ping. And still, the pixel size of the resulting topographic maps maybe as small as 50 meters. This is very detailed and we are happy to have such a high quality tool on board.
Still, sometimes it is not detailed enough. Rocks, craters and other structures that are 50 meters in diameter or smaller will be represented on the map with only one pixel or may not be visible at all. To investigate such smaller structures we have to get closer to the seafloor. Some days ago we conducted such a high resolution survey in the Belgium trial area by attaching a small multibeam (Kongsberg EM2040; 0.7° beam opening angle) to our remotely operated underwater vehicle (ROV KIEL 6000). This operation was challenging and the area we covered was less then 1 percent of what we could have mapped if we would have used the ship multibeam for the same amount of time. But the much higher resolution – a pixel size of about one meter – is important for us to understand what the area looks like in its natural and undisturbed state.
by Peter Urban, GEOMAR and Dr. Julia Otte, AWI

Abb. 1: Hier sehen Sie den Meeresboden als 3D-Karte. Die Karte besteht aus echten Daten und wurde vor ca. 2 Wochen von uns aufgenommen. Allerdings haben wir die Höhe der Strukturen um das fünffache überhöht damit sie besser sichtbar sind. Die tiefsten Werte (in Blau) sind etwa 4300 Meter unter dem Wasser. Die höchsten Berge (Werte in Rot) sind etwa 600 Meter höher. Die zusätzlichen Zeichnungen dienen lediglich der Veranschaulichung und sind nicht korrekt skaliert. Jeder Ping des Fächerecholotes ermöglicht es uns, einen Streifen des Meeresbodens zu sehen. Die Karte entsteht beim vorwärts bewegen. So können wir, Linie für Linie, unser Verständnis der Meeresbodentopography erweitern. Graphic: Julia Otte
Die Kartierung des Meeresbodens
Wie können wir Forschungseinsätze planen, die 4000 Meter unter dem Wasser stattfinden? Wie in riesigen Unterwassergebieten den richtigen Ort für unsere Untersuchungen finden? Wie entscheiden, wo wir unsere Sensoren platzieren? Welchen Pfad sollen wir für unseren nächsten Videoeinsatz wählen? Wo genau sollen wir mit unserem Unterwasserroboter ROV KIEL 6000 (remotely operated underater vehicle / ROV) hintauchen?
Die Antworten auf diese Frage sind vielfältig und kompliziert. Aber die Grundlage für die Planung nahezu jeden Unterwassereinsatzes bilden bathymetrische Tiefenkarten. Bathymetrie ist eigentlich nur ein anderes Wort für Meeresbodentopographie. Eine bathymetrische Karte – oder einfach Tiefenkarte – zeigt uns die exakte Tiefe an jeder Stelle des Meeresbodens und ist wichtig für uns, um die zu untersuchende Gegend zu verstehen. Ohne diese Karten müssten wir quasi auf einem weißen Blatt Papier planen. Es wäre somit viel riskanter, unsere Geräte blind auf dem Meeresboden zu platzieren, und die Interpretation der Daten wäre schwieriger ohne jedes Wissen, wie die Gegend aussieht, in der wir die Daten erhoben haben.
Das derzeit beste verfügbare Werkzeug, um die Kartierung des Meeresbodens zu ermöglichen, ist ein Fächerecholot. Dieses Gerät basiert auf der Funktion eines Sonars. Es wird ein kurzes akustisches Signal – auch Ping genannt – zum Meeresboden gesendet. Dann wird gewartet bis dieses Signal vom Meeresboden reflektiert wird und zum Fächerecholot zurückkehrt. Aus der Zeit, die das Signal für diese Reise braucht, und aus der bekannten Unterwasserschallgeschwindigkeit kann das System die exakte Entfernung zum Meeresbodens berechnen.
Aber Fächerecholote sind besondere Systeme, welche speziell für die Kartierung des Meeresbodens entwickelt wurden. Was sie besonders macht, ist dass sie für jeden einzelnen Ping hunderte an exakten Tiefenpositionen berechnen können. Die Abbildung verdeutlicht wie Fächerecholotmessungen in etwas aussehen. Die Kartierung mit dem Fächerecholot ermöglicht uns so großskalige detaillierte Karten mit einem Minimum an benötigten Vermessungslinien.
Wie groß genau die zu vermessende Gegend ist, und wie detailliert die prozessierte Karte sein wird, hängt vom verwendeten System und von der Entfernung zum Meeresboden ab. Das ist vergleichbar mit Aufnahmen einer Kamera mit fester Brennweite. Um ein Landschaftsfoto von einem großen Berg zu machen, muss man etwas weiter davon entfernt stehen. Aber wenn man entsprechend weit vom Berg weg ist, kann man natürlich auch weniger Details sehen und eventuell die einzelnen Bäume, die den Berg bedecken, nicht mehr unterscheiden. Mit dem Fächerecholot, das auf der FS SONNE installiert ist (Kongsberg EM122; 1° Beamöffnungswinkel), können wir in vier Kilometer Wassertiefe bis zu acht Kilometer Meeresboden links und rechts vom Schiff erfassen. Die Pixelgröße – bzw. Auflösung – der so erstellten Tiefenkarten ist dabei ungefähr 50 Meter. Das sind für diese Entfernung sehr detailierte Karten und wir sind dementsprechend glücklich, ein so gutes System auf der FS SONNE zu haben.
Manchmal ist diese Auflösung aber nicht gut genug. Steine, Krater und andere Strukturen, die bis zu 50 Meter groß sind, oder kleiner, werden auf diesen Karten mit nur einem Pixel abgebildet oder sind gar nicht sichtbar. Um solche kleinere Strukturen entdecken und untersuchen zu können, müssen wir näher an den Meeresboden heran. Vor einigen Tagen haben wir eine hochaufgelöste Tiefenkarte vom Testgebiet im Belgischen Explorationsgebiet erstellt, indem wir ein kleines Fächerecholot (Kongsberg EM2040; 0.7 ° Öffnungswinkel) an unser ROV KIEL 6000 gebaut haben. Diese Operation war aufwändig und schwierig und wir haben weniger als einen Prozent dessen kartiert was wir im gleichen Zeitraum mit dem Schiffsfächerecholot hätten Kartieren können. Aber die viel höhere Auflösung von weniger als einem Meter ist wichtig für uns, um zu verstehen wie genau die Topographie des Gebietes im natürlichen Zustand aussieht.
Von Peter Urban, GEOMAR, und Dr. Julia Otte, AWI