Today we present the benthic crawler “Tramper” and it first steps at the seafloor in 4150m water depth. Tramper was designed and constructed within the HGF Allianz ROBEX (http://www.robex-allianz.de/) to measure oxygen concentration in the sediment autonomously over a longer period (up to one year). During this expedition we performed the first in situ test to get information’s on: deploying Tramper with the Launcher, how does it hit the seafloor, how does it move over the seafloor, and how does it perform during ascent. The scientific purpose of Tramper is to perform a series of oxygen concentration measurements in the sediment over a certain period of time. Oxygen is an absolutely key element for nearly every living creature here on earth.. At the seafloor the sediment water interface is one of the most important transition zones for solute exchange; it is characterized by a thin oxic horizon with steep O2 gradients and an extensive spatial and temporal heterogeneity.
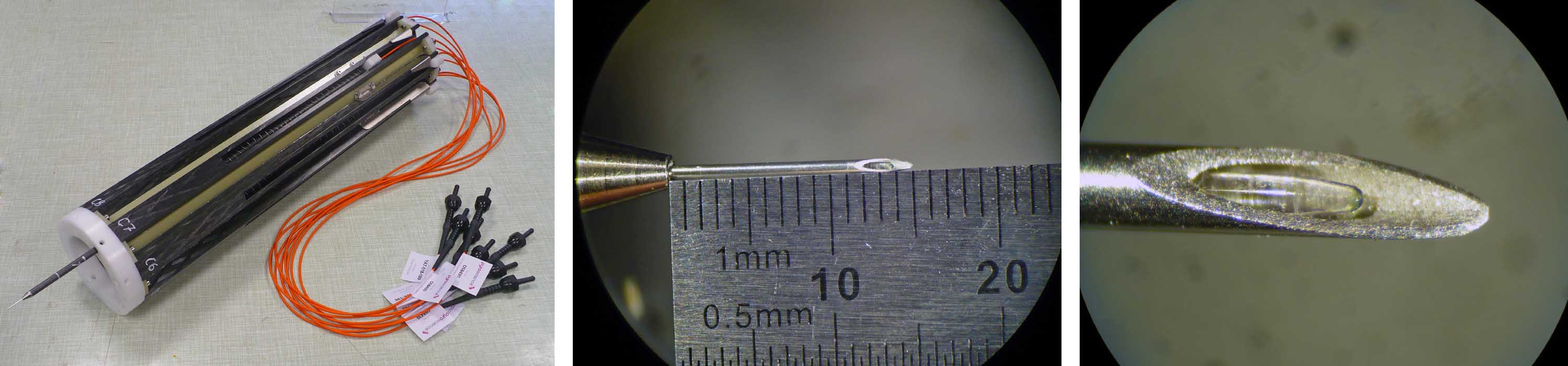
Fig. 1 (left) Revolver-system with 8 oxygen optodes; (middle) sensor needle; (right) sensor tip with the fiber cable. Photos: Johannes Lemburg
To measure oxygen we use optodes that consist of a fiberoptic cable with a tiny dot of fluorescent paint at its tip. This special paint changes its way to shine back in the presence or absence of oxygen after being activated by a light source. To protect the fiberoptic cable we house it in a syringe needle that is attached to a 50 centimeter long carbon fiber stick. Since we cannot avoid that the sediment rub the paint off or the sensor gets destroyed by hitting a manganese nodule buried in the seafloor, we designed a revolving system to exchange sensor in situ during the deployment. To get as much oxygen gradients as possible we put eight of these needles in the revolving magazine and combine three of these to a device called O2-Profiler. For the oxygen profile measurement one sensor from each revolver magazine is moved stepwise into the sediment. The actual measurement of the oxygen gradient takes about two hours, because it is put together by thousands of single measurements with the needles lowered into the sediment just by tiny steps about 1/10 of a milimeter. If the needle gets moved sideways the measurement is spoiled and therefore the O2-Profiler has to be placed on a steady carrier. We often use landers, that you´ve seen in the previous blog, but these are stationary systems. To overcome this limitation we mounted the O2-Profiler on a new device, the benthic crawler “Tramper”. With its mini-excavator caterpillar tracks Tramper is able to move over the seafloor thus allowing several measurements at different spatial and temporal scales. Tramper has a mass of 653kg mostly is due to the 6000m rated syntactic foam, that makes Tramper just 20kg negative buoyant in sea water of 35 PSU salinity. The O2-Profiler is mounted on the left side of the front, just besides a 10” glass sphere that contains a photo camera to document the measurement site. During this cruise Tramper did its maiden voyage down to 4146m water depth and already returned safely from its second deployment. To deploy Tramper on a well chosen spot, we attach it to a Launcher system, that you already know from the OFOS blog. In fact the Launcher is just a reconfigured OFOS with a video camera in the front and a special quick-release adapter on its lower side. Because Tramper is nearly buoyant when submerged, we also need the 600kg stainless steel frame of Launcher as a weight to allow faster descent of the cable.
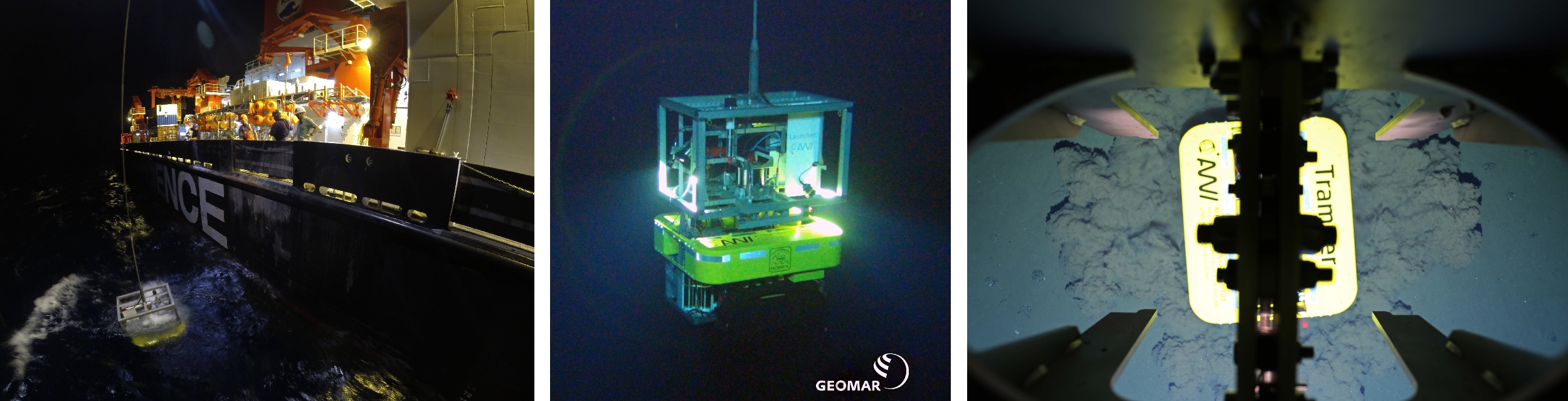
Figure 2: Launcher/Tramper System during the first mission. (left) deployment from the deck of RV Sonne; (middle) Arriving at the seafloor; (right) landing on the seafloor seen through the Launcher camera. Photo: Kiel6000 Team Geomar and Johannes Lemburg.
During Trampers first deployment we had the special opportunity to observe the release and landing with the ROV Kiel6000 waiting on the spot. This is a quite tricky operation for the ROV crew to perform, because the ROVs umbilical may entangle with the Launcher cable due to unfortunate currents in the water column. We had about 5 Bft wind and a swell of 2,5m, but the ships crew and the ROV team worked perfectly together to make this awesome rendezvous possible. At the seafloor we performed several cycles of movements to investigate the driving behaviour on soft sediments.
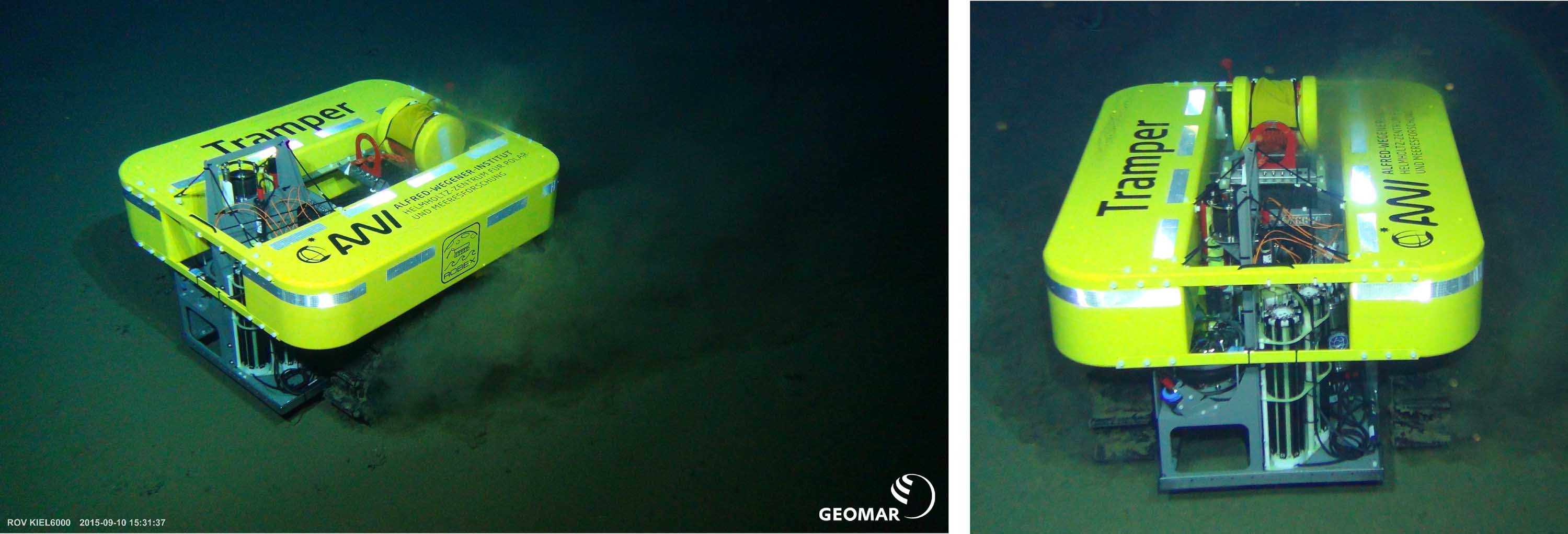
Figure 3: Benthic Crawler “Tramper” at 4146m water depth. Photo: Kiel6000 Team Geomar
Tramper moved with a speed of 2 m/min for a distance of 10 m and repeated this cycle several times. As we had the ROV down at the same time we could follow Tramper on its way on the Pacific seafloor. The video observation showed that the caterpillar tracks do not get stuck in the soft sediment and the disturbance is minimized to the small tracks Tramper creates during its movement. To get Tramper back to the surface after a completed mission, it carries a 100kg steel drop-weight that is triggerd by an accoustic releaser from the waiting research vessel. This accoustic system also allows to track the ascending crawler until short below the surface. On Trampers first two missions we found him just by looking out for its flash-light beacon at night, but this just works here in the clear pacific nights. For recovery during daylight or foggy conditions, we also have additional devices such as an Argos satellite transmitter and a radio beacon mounted on Tramper. During this expedition we collect first experiences how Tramper performs in the deep ocean. The main mission for Tramper is, however, to perform a 12-month mission in the Arctic Ocean at the AWI deep sea oberservatory HAUSGARTEN. Therfore all electronic components are tuned to consume as less energy as possible, but to ensure enough juice for light and mobility 85kg of its dry weight are related to its battery that runs on 32V and has a capacity of 3,8kWh. In fact Tramper does not drive very far or fast, as we aim for temporal not a special distribution of the measurements over one year. Tramper has a maximum speed of 13 m/Min., but is most of the time in a sleeping state, just to crawl about 50m, do a measurement, take a photo and go back to sleep for one week. The intention is to repeat this cycle 52-times during Tramper’s mission in the Arctic.
Johannes Lemburg & Frank Wenzhöfer (AWI)