It’s the final sprint! The last few days of the M215 (MMC – 3) were once again used to the full. The measuring instruments that recorded seismic activity and ocean floor magnetotellurics during the expedition are being recovered and the data secured, the MOMO video sled is going on dives and our AUVs are also being used several times.
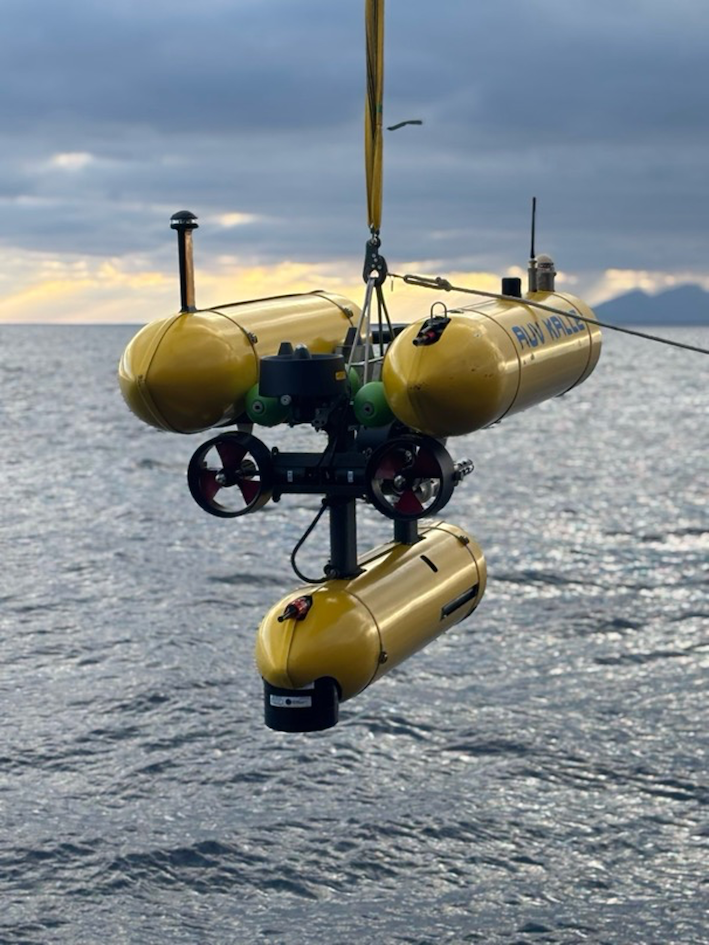
The AUV team on the M215 (MMC-3) consists of three people (Danilo, Nikolaj and Luca) and two underwater vehicles (Kalle and Anton). An AUV, short for Autonomous Underwater Vehicle, independently follows a route predetermined by the team and collects high-resolution data on the nature of the seabed. It thus supplements the less accurate, large-scale data sets measured with the ship-based multibeam system. However, these already provide information about the subsoil, which forms the basis for selecting particularly interesting areas and creating profiles for the underwater vehicles.

The AUVs can be recognised from afar by their bright yellow colour. Their three metal tubes are packed with technology that is important for measurement, but also for underwater orientation and full control of the vehicles in all three dimensions.

What does a typical AUV mission involve? To launch the AUV into the water, it is first attached to a suspension device, the releaser, and lifted into the water using one of the ship’s many winches. The vehicle is then lowered to just above the seabed, where it is finally released: the releaser is activated remotely from the ship and the AUV is set free.

However, ‘free’ is only half true, because Kalle and Anton don’t really drive around freely in the water – they follow their programmed route. If they lose contact with the ship and can no longer determine their exact position, they surface instead of continuing on their own – accident prevention. At depths of up to 500 metres, where the two operate, it is sometimes not so easy to maintain the connection that is required at all times. However, once established, the route can be navigated precisely, and the data that the AUVs transmit to the sea surface is used to produce accurate bathymetric maps of the selected areas. A particular focus of this expedition is the precise mapping of the Kolumbo submarine volcano northeast of Santorini and the Anhydros fault.

Best regards, also from Kalle and Anton,
The M215 team (MMC – 3)