Es geht in den Endspurt! Die letzten Tage der M215 (MMC – 3) wurden noch einmal voll ausgeschöpft. Die Messinstrumente, die während der Ausfahrt seismische Aktivität und Ozeanboden-Magnetotellurik gemessen haben, werden geborgen und die Daten gesichert, der Videoschlitten MOMO geht auf Tauchgänge und auch unsere AUVs kommen mehrfach zum Einsatz.
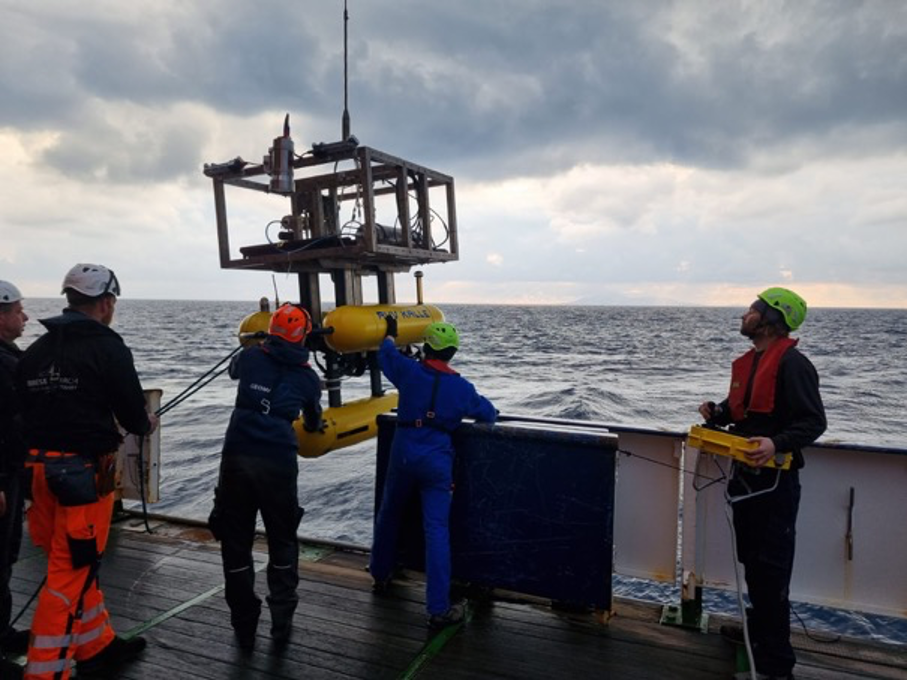
Das AUV-Team besteht auf der M215 (MMC – 3) aus drei Personen (Danilo, Nikolaj und Luca) – und zwei Unterwasserfahrzeugen (Kalle und Anton). Ein AUV, kurz für Autonomous Underwater Vehicle, fährt, entsprechend dem Namen, selbstständig eine Route ab, die im Vorhinein vom Team vorgegeben wurde, und sammelt dabei hochaufgelöste Daten über die Beschaffenheit des Meeresbodens. Damit ergänzt es lokal die weniger genauen, großflächigen Datensätze, die mit dem schiffsbasierten Multibeam-System gemessen wurden. Durch diese liegen jedoch bereits Informationen über den Untergrund vor, welche die Basis für die Auswahl besonders interessanter Bereiche und die Erstellung der Profile für die Unterwasserfahrzeuge bilden.
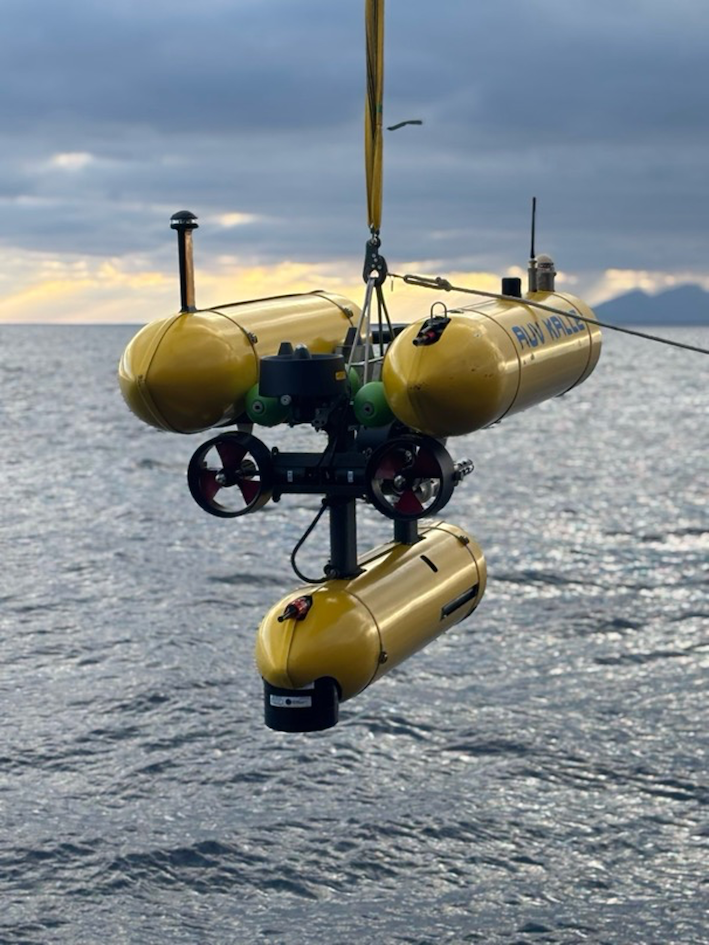
Die AUVs erkennt man bereits von Weitem an ihrer leuchtend gelben Farbe. Ihre drei Metallrohre stecken voller Technik, die für die Messung, aber auch für die Orientierung unter Wasser und die vollumfängliche Steuerfähigkeit der Fahrzeuge in allen drei Dimensionen wichtig ist.

Wie läuft ein typischer Einsatz für die AUVs ab? Um das AUV ins Wasser zu lassen wird es zunächst an einer Aufhängevorrichtung befestigt, dem Releaser, und über eine der vielen Schiffswinden ins Wasser gehoben. Danach wird das Gefährt bis knapp über den Meeresgrund runtergefahren und bekommt dann endlich seinen Auslauf: Der Releaser wird aus der Ferne vom Schiff ausgelöst und das AUV wird frei gelassen.

Wobei „frei“ auch nur so halb stimmt, denn so wirklich frei fahren Kalle und Anton im Wasser nicht herum – sie folgen der ihnen einprogrammierten Route. Verlieren sie den Kontakt zum Schiff und können ihre genaue Position nicht mehr bestimmen, tauchen sie auf, anstatt auf eigene Faust weiter zu fahren – Unfallvermeidung. In den bis zu 500m Tiefe, in denen die beiden hier operieren, ist es teils gar nicht so leicht, die dauerhaft benötigte Verbindung aufrechtzuerhalten. Besteht sie jedoch, kann die Route präzise abgefahren werden, und aus den Daten, die die AUVs an die Meeresoberfläche befördern, ergeben sich genaue bathymetrische Karten der ausgewählten Gebiete. Ein besonderer Fokus liegt auf dieser Ausfahrt auf der genauen Kartierung des submarinen Vulkans Kolumbo nordöstlich von Santorini, und der Anhydros-Verwerfung.

Viele Grüße, auch von Kalle und Anton,
Das Team der M215 (MMC-3)