Eine deutsche Version ist weiter unten zu finden.
Just as Sherlock Holmes is only as good a detective as he is, since he considers all the evidence he can find and does not rely on fingerprints alone, here in the Gulf of St Lawrence, we apply all the methods available to us, in order to get input from as many perspectives as possible. Like that, we get the chance to learn about the freshwater offshore Prince Edward Island. The different methods are sensitive for different physical properties and different depths. We will be hunting for evidence for freshwater in the next few entries from the sea surface to several hundred meters below the seafloor. Let’s get going!
Part one: Shout and Listen!
The hydroacoustic instruments, which are mounted on the ship’s hull, are well established and reliable. Even though they all use the principle of echo sounding (“make a noise and listen for the echo”), the application is versatile. The MultiBeam Echo Sounder (MBES), sends out beams of sound in high frequencies and in a wide angle towards the seafloor. The beams are scattered on the seafloor and part of the energy returns to the receivers. In this way, we can map a broad swath of the seafloor at once, which makes the MBES a good method for getting an overview of the area, on the basis of which more specific targets can be chosen.

The Sediment Echo Sounder (SES) uses lower frequencies and a single beam of sound. Lower frequencies can penetrate into the seafloor and are reflected by deeper layers of sediment. In this way we get an idea of what kind of sediments to expect on the seafloor and up to several tens of meters below. It is imaging the shallow geology. Certain structures like pockmarks can already present evidence for seepage of water from the ground and the SES images form the basis on which good locations for taking sediment cores are chosen. More on that in a later post.
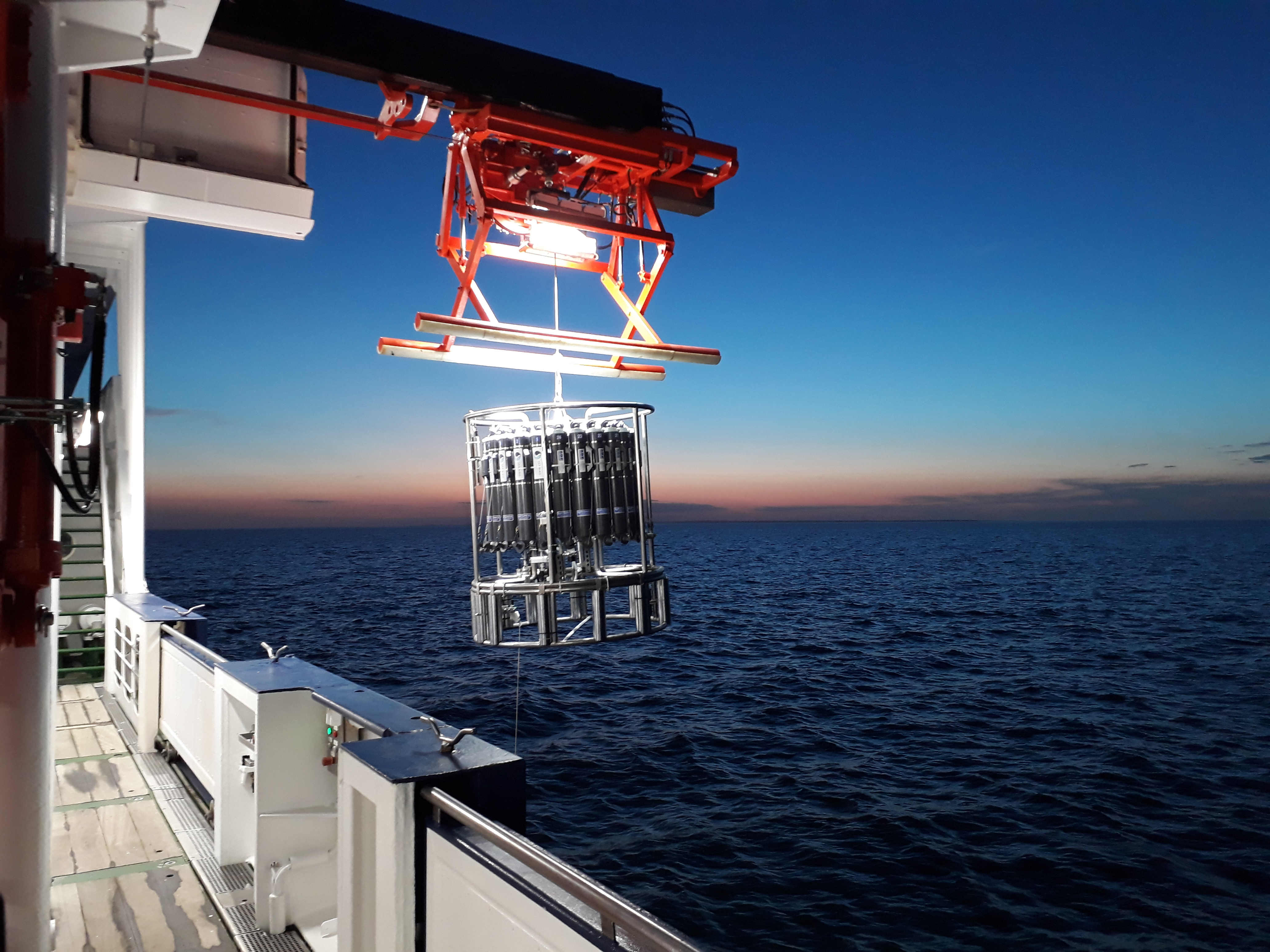
Sound travels through water at approximately 1500 m/s (~5400 km/h), but the amount of salt (the salinity) in the water can have a big influence on this parameter. In order to find fresher water in the ocean, which might have seeped out of the ground, we can therefor look for changes in the velocity in the water column. We do this with a CTD probe (Conductivity, Temperature, Depth), which is lowered into the water and creates sound velocity profiles, i.e. the speed of sound at every point in the water column between the ship and the seafloor.
These profiles are also important for the processing of the MBES data. If the difference of sound velocity between two bodies of water is big enough, the sound is also reflected and scattered. When somebody is talking to you, but your head is underwater, you will hear them muffled and not as loud, because part of the sound is reflected by the water surface. This is the same principle, although the effect is much smaller with fresh and salt water. Nevertheless, it is detectable and that is why our MBES can also record energy that is scattered in the water column.
Have you ever been passed by a fast car or an ambulance? When it is driving towards you, the sound it makes is higher than when it is driving away from you (the typical “Neeouuuuww!” of a passing car). In physics this is called the Doppler Effect. The ADCP (Acoustic Doppler Current Profiler) is using this principle to find out in which direction a water mass is moving. It is sending out a signal, which is reflected by particles flowing in the water. If the particle is moving away, the reflected signal has a lower pitch, if it is coming closer, the pitch is higher. In this way we could potentially find evidence for a body of water which is moving in a different direction, which could be less salty.
All of these methods are based on the same physical parameters, the way sound moves through water and only cover the water column and the first few meters of seafloor, so stay tuned for the next blog, where it’s getting a bit louder and deeper.
Genau wie Sherlock Holmes nur ein so guter Detektiv ist, weil er alle Beweise und Hinweise untersucht, die er finden kann und sich nicht bloß auf Fingerabdrücke verlässt, so wenden wir hier im Golf von St. Lorenz alle wissenschaftlichen Methoden an, die uns zur Verfügung stehen, um nach Süßwasser zu suchen. Die verschiedenen Methoden sind sensitiv für unterschiedliche physikalische Eigenschaften und Tiefen. Wir werden in den nächsten Einträgen von der Wasseroberfläche bis mehrere hundert Meter unter dem Meeresboden nach Spuren von Frischwasser suchen. Los geht’s!
Teil eins: Rufen und Lauschen!
Die hydroakustischen Instrumente, die fest am Schiffsrumpf deutscher Forschungsschiffe installiert sind, sind verlässlich und alt-bewehrt. Obwohl sie alle das Prinzip der Echo-Ortung benutzen („Mache ein Geräusch und höre auf das Echo“) und damit Echolote sind, ist ihre Anwendung sehr vielseitig. Das Fächerecholot (Auch Multi Beam Echo Sounder, MBES) sendet gebündelte, hochfrequente Schallwellen in einem breiten Fächer nach unten aus. Die Schallstrahlen werden am Ozeanboden gebrochen und ein Teil der Energie gelangt zurück zu den Empfängern. Auf diese Weise können wir einen einige hundert Meter breiten Streifen des Meeresbodens auf einmal abtasten, was das MBES zu einer guten Methode macht, um einen Überblick über das Gebiet zu bekommen. Auf dessen Basis können dann genauere wissenschaftliche Ziele ausgesucht werden.
Das Sediment Echolot (Sediment Echo Sounder, SES) benutzt weniger hohe Frequenzen und nur einen gebündelten Schallstrahl. Niedrige Frequenzen können in den Meeresboden eindringen und werden erst dort von tieferliegenden Sedimentschichten reflektiert. So bekommen wir eine Idee was für Sedimente wir am Meeresboden und mehrere Zehnermeter darunter erwarten können. Es bildet also die flache Geologie ab. Bestimmte Strukturen können dabei schon Hinweise auf das Entweichen von Wasser aus dem Untergrund sein. Außerdem bilden diese Daten die Grundlage auf der gute Positionen ausgesucht werden, an denen Sedimentkerne genommen werden können. Aber dazu mehr in einem späteren Eintrag.
Schall verbreitet sich in Wasser mit einer Geschwindigkeit von ca. 1500 m/s (ca. 5400 km/h), aber der Salzgehalt kann einen großen Einfluss auf diesen Wert haben. Um Frischwasser in der Wassersäule zu finden, das aus dem Boden ausgetreten sein könnte, können wir deshalb nach Unterschieden in der Schallgeschwindigkeit Ausschau halten. Das geschieht mit einer CTD (Conductivity, Temperature, Depth; also Leitfähigkeit, Temperatur, Tiefe), die langsam hinuntergelassen wird und dabei ein Schallgeschwindigkeitsprofil erstellt, d.h. sie misst die Schallgeschwindigkeit and jedem Punkt zwischen dem Schiff und dem Meeresboden.
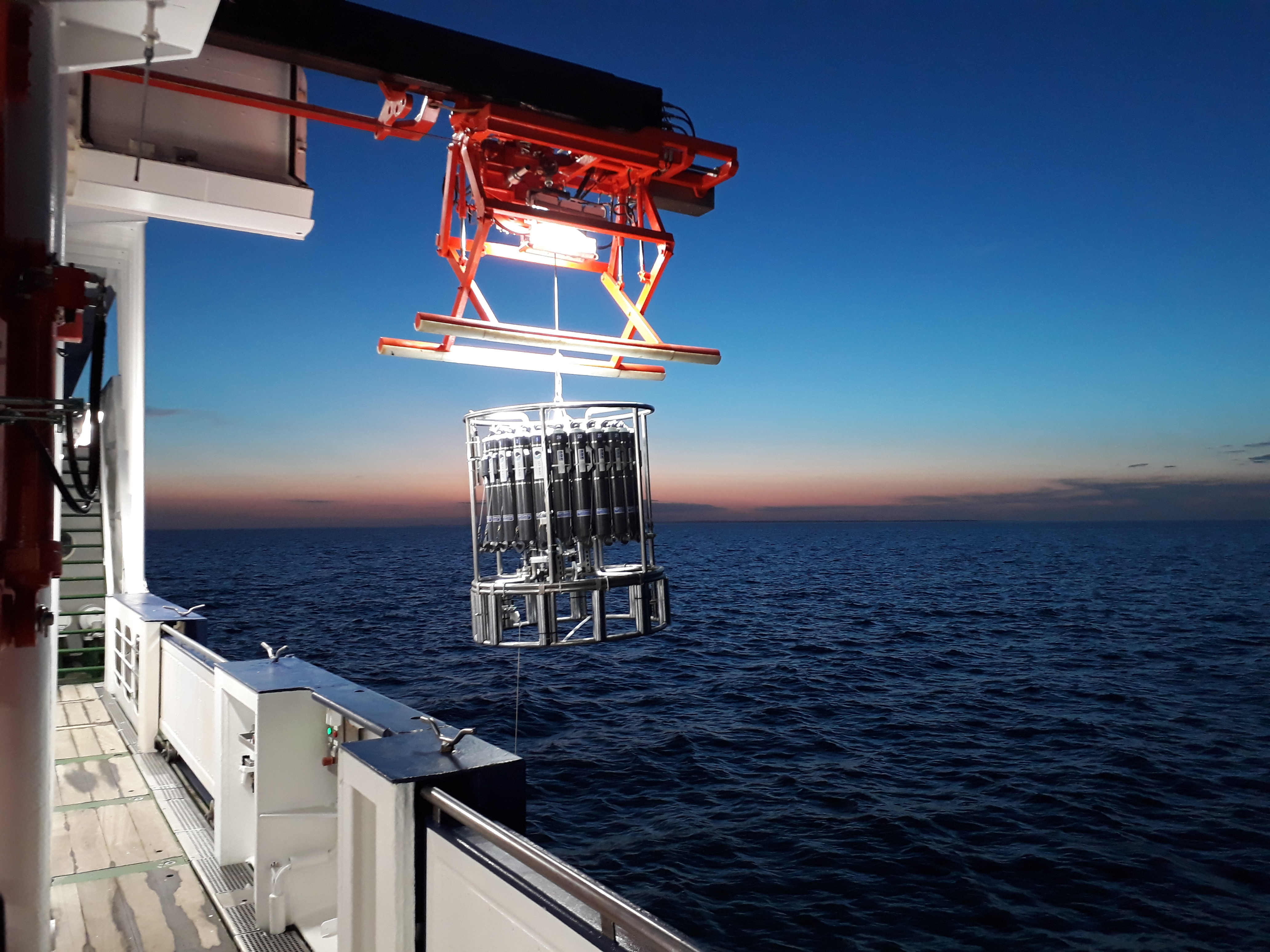
Tiefe befinden. (Foto: Henrike Timm)
Diese Information ist auch wichtig für die Bearbeitung der MBES Daten. Ist der Unterschied der Schallgeschwindigkeiten zwischen zwei Wassermassen groß genug, kommt es an der Grenze auch zur Reflektion und Brechung eines Teils der Schallwellen. Wenn man mit dem Kopf unter Wasser ist, hört man Geräusche deutlich leiser und weniger klar, weil ein Teil des Schalls an der Wasseroberfläche reflektiert und gebrochen wird. Das ist das gleiche Prinzip, auch wenn der Effekt zwischen Salz- und Süßwasser viel kleiner ist. Es ist dennoch detektierbar und der Grund, weshalb unser MBES auch reflektierte Energie aus der Wassersäule aufnehmen kann.
Wurden Sie schonmal von einem schnellen Auto oder einem Krankenwagen überholt? Wenn es auf Sie zukommt, klingt das Geräusch höher, als wenn es von Ihnen wegfährt (das typische „Nniiiiauuu!“ eines vorbeifahrenden Autos). In der Physik nennt man das den Doppler Effekt. Der ADCP (Acoustic Doppler Current Profiler; dt. etwa: Akustischer Doppler Strömungsprofilmesser) benutzt dieses Prinzip um herauszufinden in welche Richtung sich einer Strömung bewegt. Es wird ein Signal ausgesendet, das von Schwebeteilchen im Wasser reflektiert wird. Bewegt sich das Teilchen in die Richtung des Empfängers, ist das reflektierte Signal höher als das ausgesendete, bewegt es sich weg, ist es tiefer. Auf diese Weise können wir potentiell eine Wassermasse finden, die sich in eine andere Richtung bewegt als die Umgebung, z.B. aufsteigendes Frischwasser.
All diese Methoden beruhen auf dem gleichen physikalischen Parameter: die Art und Weise, wie sich Schall in Wasser ausbreitet. Auch haben wir uns bisher nur die Wassersäule und wenige Meter unter den Meeresboden geschaut. Es wird also Zeit, dass wir im nächsten Blog tiefer gehen … und etwas lauter werden.